自動控制系統 Automatic Control Systems 筆記
Ch1 Introduction to Control Systems
控制系統基本組成
- 控制系統的基本要素可以透過以下方式描述:
- 控制目標
- 控制系統組件
- 結果或輸出
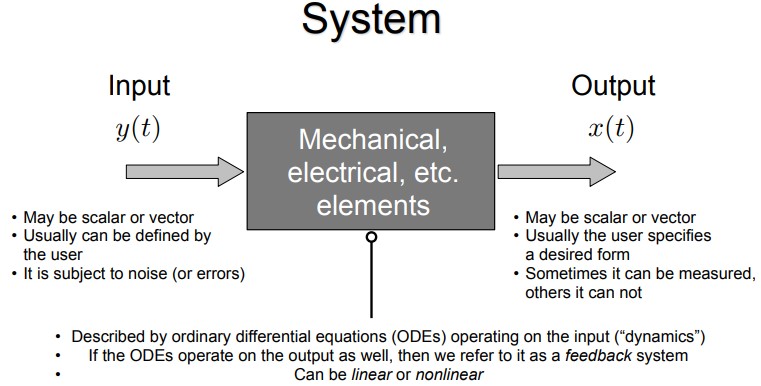
- 控制系統的目標是透過控制系統的元件,以某種規定的方式透過輸入來控制輸出,元件可以透過方塊圖表示。
控制系統的應用範例
-
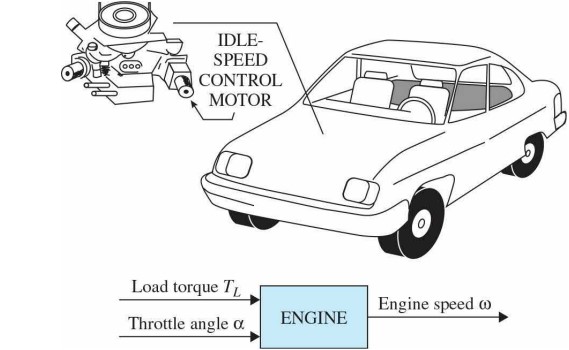
控制系統的一個例子,汽車引擎的怠速控制。這種控制系統的目標是無論施加的引擎負載(例如變速箱、動力轉向、空調)如何,都將引擎怠速保持在相對較低的值(為了燃油經濟性)。如果沒有怠速控制,任何突然的引擎負載應用都會導致引擎轉速下降,從而可能導致引擎熄火。因此,怠速控制系統的主要目標是
- 消除或最小化引擎負載時的速度下降
- 將引擎怠速維持在期望值
節氣門開度 $\alpha$ 和負載扭力 $T_{L}$(由於空調、動力轉向、變速箱或動力煞車等的應用)是輸入,引擎轉速 $\omega$ 是輸出。
-
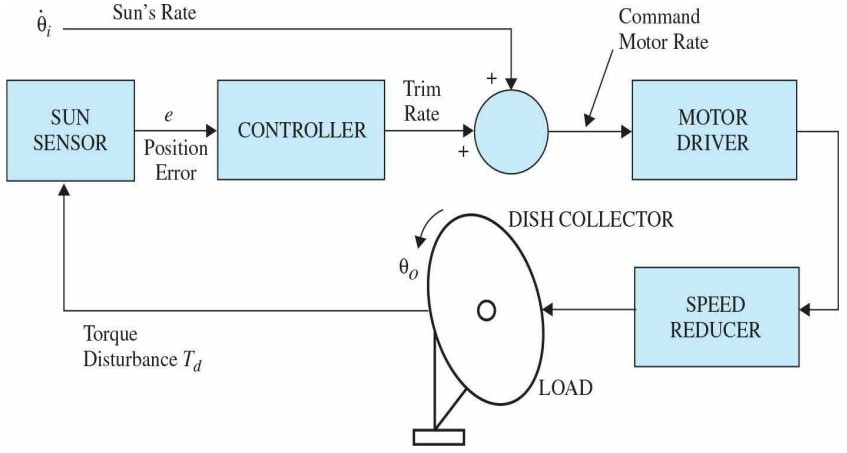
控制系統的另一個例子,追日系統,控制器確保追蹤收集器在早晨指向太陽並發送“開始追蹤”命令。控制器在白天不斷計算兩個控制軸(方位角和仰角)的太陽速率。
控制器使用日照率和太陽感測器資訊作為輸入來產生適當的馬達命令來轉動收集器。
Open-loop vs. Closed-loop
Open-loop (Nonfeedback System)
- 開環系統簡單便宜,但通常不準確。前面提到的怠速控制系統就是開環控制系統,不難看出該系統性能較難滿足需求。例如,如果將節氣門角度 $\alpha$ 設定為與特定引擎轉速相對應的特定初始值,則當施加負載扭力 $T_{L}$ 時,無法防止引擎轉速下降。使系統正常工作的唯一方法是根據負載扭矩的變化調整 $\alpha$,以將 $\omega$ 維持在所需水平。

Close-loop (Feedback System)
-
為了更準確和更具適應性的控制,開環控制系統中缺少的是從系統的輸出到輸入的連結或回授。為了獲得更精確的控制,應回授受控訊號並與參考輸入進行比較,並且必須透過系統發送與輸入和輸出之差成比例的驅動訊號以校正誤差。具有一個或多個回授路徑(例如剛剛描述的)的系統稱為 Close-loop System。
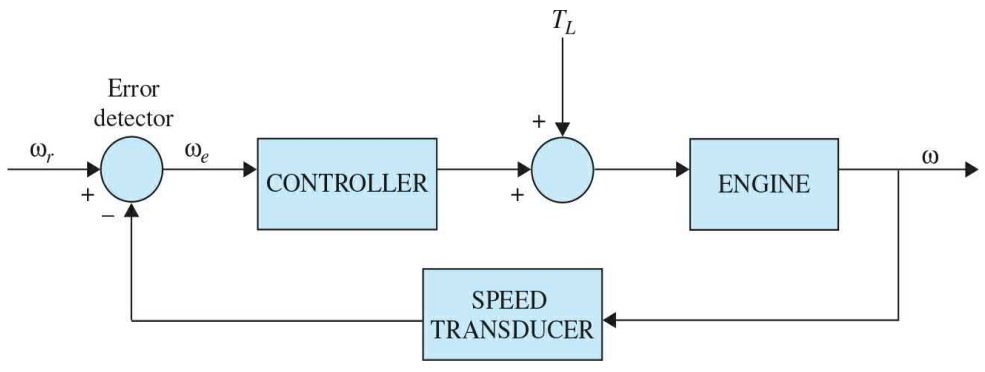
閉環怠速控制系統如圖所示。參考輸入 $\omega_{r}$ 設定所需的怠速。怠速時的引擎速度應與參考值 $\omega_{r}$ 一致,並且諸如負載扭矩 $T_{L}$ 之類的任何差異由速度感測器和誤差檢測器感測。控制器將對差異進行操作並提供訊號來調整節氣門角度 $\alpha$ 以校正誤差。
-
下圖比較開環和閉環怠速控制系統的典型性能。左圖為開環系統,在施加負載扭力 $T_{L}$ 後,開環系統的怠速將下降並穩定在較低值。右圖為閉環系統,施加負載扭力 $T_{L}$ 後,閉環系統的怠速迅速恢復到預設值。

Feedback
閉環系統的回授用於減少參考輸入和系統輸出之間的誤差。然而,控制系統中回授影響的重要性比這些簡單例子所證明的更為複雜。系統誤差的減少只是回授可能對系統產生的許多重要影響之一。我們將在以下部分中展示回授也會對 stability, bandwidth, overallgain, impedance, and sensitivity 等系統效能特性產生影響。
Stability
-
我們可以透過簡單的靜態系統符號來討論,無須線性系統理論的必要數學基礎。考慮下圖 所示的簡單回授系統配置,其中 $r$ 是輸入訊號、 $y$ 是輸出訊號、 $e$ 是誤差、 $b$ 是回授訊號。參數 $G$ 和 $H$ 可以被認為是恆定增益。
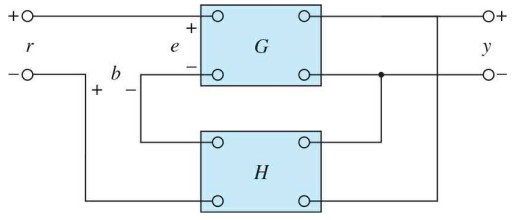
透過簡單的代數運算,可以簡單證明系統的輸入輸出關係為: $$\large M = {\frac {y}{r}} = {\frac {G}{1 + GH}} $$
- 根據上述方程式,回授會以 $1 + GH$ 這個因子影響無回授系統的增益 $G$。上圖的回授系統被稱為負回授系統,因為回授訊號上有一個負號。 $GH$ 本身可能也包含負號,因此回授的總體效果可能是增加或減少增益 $G$。
- 在實際的控制系統中,$G$ 和 $H$ 是頻率的函數,因此 $1 + GH$ 的幅值在某些頻率範圍內可能大於1,而在其他範圍內可能小於1。因此,回授可能在某些頻率範圍內增加系統的增益,但在其他範圍內減少增益。
- 穩定性是一個描述系統是否能夠跟隨輸入指令的概念,換句話說,它反映了系統是否有用。在較不嚴格的定義中,如果系統的輸出失控,則被認為是不穩定的。為了探討回授對穩定性的影響,當上述方程式 $GH = -1$ 時,系統對任何有限的輸入都會產生無限的輸出,這時系統被稱為不穩定。因此,我們可以說,回授可能會使原本穩定的系統變得不穩定。
-
回授確實是一把雙刃劍,當使用不當時,它可能會帶來不利的影響。不過需要指出的是,我們目前只討論靜態情況,一般來說,$GH = -1$ 並不是不穩定的唯一條件。系統穩定性的相關內容會在後續討論。
-
假設回授系統由於 $GH = -1$ 而不穩定。如果我們透過引入一個負回授增益 $F$ 來形成另一個回授迴路,如下圖所示。

則整個系統的輸入-輸出關係為:
$$ \large {\frac {y}{r}} = {\frac {G}{1+GH+GF}} $$- 很明顯,儘管 $G$ 和 $H$ 的性質使得內部迴路回授系統由於 $GH = -1$ 而不穩定,但透過適當選擇外部迴路的回授增益 $F$,整體系統仍然可以穩定。在實際操作中,$GH$ 是頻率的函數,閉迴路系統的穩定性條件取決於 $GH$ 的幅值和相位。因此,回授如果應用得當,能夠改善穩定性;但如果應用不當,則可能對穩定性有害。
Sensitivity
- 在設計控制系統時,敏感性考量通常是重要的。由於所有物理元件的特性會隨著環境和時間的變化而改變,我們無法假設控制系統的參數在整個運行壽命中始終保持不變。
- 例如,電動機的繞組電阻會隨著運行過程中溫度的升高而改變。具有電子元件的控制系統在剛啟動時可能無法正常運作,因為系統參數在預熱過程中仍在變化。這種現象有時被稱為morning sickness。
- 一般來說,一個良好的控制系統應該對參數變化不敏感,但對輸入指令敏感。我們將探討回授對參數變化敏感性的影響。我們將 $G$ 視為一個可能變化的增益參數。整個系統增益 $M$ 對 $G$ 變化的敏感性定義為:
$$\large S_{M}^{G} = {\frac {{\partial{M}}/{G}}{{\partial{G}}/{M}}} = {\frac {percentage\ change \ in\ M}{percentage\ change \ in\ G}} = {\frac {\partial{M}}{\partial{G}}}{\frac{G}{M}}$$
其中 $ \partial M $ 表示由於 $G$(或 $ \partial G $)導致的 $M$ 的增量變化,$ \partial G $ 表示系統元件變化量。
Disturbance and Noise
-
所有物理系統在運作過程中都會受到某些類型的外部信號或噪音的影響,例如,電子電路中的熱噪音電壓和電動機中的刷子或換向器噪音就是這些信號的例子。此外,外部擾動,如風吹在天線上的影響,在控制系統中也非常常見。
-
因此,控制系統應該被設計成對噪音和擾動不敏感,並對輸入命令敏感,而回授可以減少噪音的影響。
-
回授對噪音和擾動的影響在很大程度上取決於這些外部信號在系統中的位置。雖然不能得出一般性的結論,但在許多情況下,回授可以減少噪音和擾動對系統性能的影響。以下圖為例。
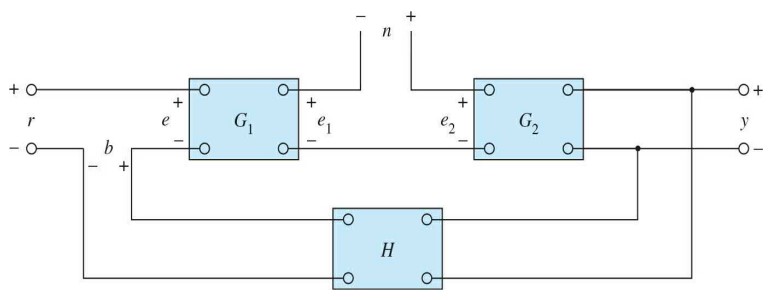
其中 $r$ 表示指令信號,$n$ 是噪音信號。在沒有回授的情況下,即 $H = 0$,由於僅有 $n$ 作為作用,輸出 $y$ 是: $$\large y = G_{2}n$$ 在有回授的情況下,由於僅有 $n$ 作為作用,系統輸出 $y$ 是: $$\large y = {\frac {G_{2}}{1+G_{1}G_{2}H}}n$$
- 比較有回授與無回授公式可以看出,如果 $1 + G_1G_2H$ 大於 1 且系統保持穩定,則噪音成分會被 $1 + G_1G_2H$ 這個因子所減少。
- 在後續章節中,前饋和前向控制器配置與回授一起使用,以減少擾動和噪音輸入的影響,一般而言,回授還會影響帶寬、阻抗、瞬態響應和頻率響應等性能特徵,這些影響會在後續內容中進一步解釋。
Type of control system
- 控制系統又可以根據其特性分類為:
- Single vs Multiple Inputs / Single vs Multiple Outputs
- SISO (single input - single output)
- SIMO
- MISO
- MIMO
- Feed-forward or Feedback
- Linear or Nonlinear
- Time-varying or Time-invariant
- Continuous-data or Discrete-data
- Modulated or Unmodulated
- Single vs Multiple Inputs / Single vs Multiple Outputs
- 控制系統通常根據系統的主要用途進行分類。例如,位置控制系統和速度控制系統控制輸出變量,正如其名稱所暗示的那樣。一般來說,根據系統的一些特殊特徵,還有許多其他的識別控制系統的方法,在開始分析和設計這些系統之前,了解一些更常見的控制系統分類方法非常重要,另外大多數現實生活中的控制系統都具有一定程度的非線性特性。
Linear and Nonlinear
- 這種分類是根據分析和設計的方法來進行的。嚴格來說,線性系統在實踐中並不存在,因為所有物理系統在某種程度上都是非線性的,線性回授控制系統是分析者為了簡化分析和設計而理想化的模型。
- 當控制系統中的信號幅值限制在系統組件顯示線性特徵的範圍內(即,疊加原則適用)時,系統本質上是線性的。但是,當信號幅值超過線性操作的範圍時,根據非線性的嚴重程度,系統不再應被視為線性系統。
- 例如,控制系統中使用的放大器在其輸入信號變大時經常會顯示飽和效應;電動機的磁場通常具有飽和特性。控制系統中其他常見的非線性效應包括齒輪成員之間的回程或死區、非線性彈簧特性、移動成員之間的非線性摩擦力或扭矩等。通常,非線性特性會被故意引入控制系統中,以提高性能或提供更有效的控制。
- 例如,為了實現最小時間控制,許多導彈或航天器控制系統中使用了開關型(bang-bang 或繼電器)控制器。在這些系統中,噴嘴通常安裝在飛行器的側面,以提供姿態控制的反作用扭矩。這些噴嘴通常以全開或全關的方式進行控制,因此從給定噴嘴中在特定時間內施加固定量的空氣以控制太空飛行器的姿態。
- 對於廣泛的非線性系統,目前沒有通用的方法來求解。
Time-varying and Time-invariant
- 當控制系統的參數在系統運作過程中對時間是穩定的,這樣的系統稱為時間不變系統。實際上,大多數物理系統包含隨時間漂移或變化的元素。
- 例如,電動機的繞組電阻會在電動機啟動時隨著溫度上升而變化。另一個時間變化系統的例子是導彈控制系統,其中導彈的質量在飛行過程中隨著燃料的消耗而減少。
- 雖然時間變化的系統如果沒有非線性仍然是線性系統,但這類系統的分析和設計通常比線性時間不變系統要複雜得多。
Continuous-data and Discrete-data
- 連續系統
- 連續數據系統是指系統中各部分的信號都是時間變量 $t$ 的連續函數。
- 連續數據系統中的信號可以進一步分類為交流(ac)或直流(dc)。與電氣工程中交流和直流信號的一般定義不同,在控制系統術語中,交流和直流控制系統具有特殊的意義。
- 當提到交流控制系統時,通常是指系統中的信號是通過某種調製方案進行調製的。而直流控制系統則簡單地表示信號是未經調製的,但根據傳統定義,它們仍然是交流信號。
- 離散系統
-
離散數據控制系統與連續數據系統不同,因為系統中一個或多個點的信號以脈衝列或數字代碼的形式存在。
-
通常,離散數據控制系統被細分為取樣數據系統和數字控制系統。取樣數據控制系統指的是一類更一般的離散數據系統,其中信號以脈衝數據的形式存在。數字控制系統則是指在系統中使用數字計算機或控制器,使得信號被數字編碼,如二進制編碼。

-
數字控制系統通常對噪音的敏感度較低。
-
一般而言,取樣數據系統僅在特定的時間瞬間間歇性地接收數據或信息。例如,在控制系統中,誤差信號可能僅以脈衝的形式提供,這樣控制系統在兩個連續脈衝之間的時間段內將無法獲取關於誤差信號的任何信息。嚴格來說,取樣數據系統也可以被分類為交流系統,因為系統的信號是脈衝調製的。
-
Ch2 Modeling of Dynamic Systems
控制系統分析與設計中最重要的任務之一是系統子組件以及最終整個系統的數學建模。這些系統的模型由微分方程來表示,這些方程可以是線性或非線性的。在本書中主要討論由常微分方程來建模的系統,大多數應用中的控制系統分析與設計使用的是線性(或線性化)的模型,
另外非線性系統的處理相當複雜,因此控制系統工程師不僅需要確定如何準確地用數學描述一個系統,還更重要的是,在必要時,如何做出適當的假設和近似,使得該系統可以通過線性數學模型來合理表徵。
在本章中,我們將更詳細地探討各種控制系統組件的建模。控制系統可能由多個組件組成,包括機械、熱能、流體、氣動和電氣系統。這些系統通常稱為動態系統,透過建模原理,如牛頓第二運動定律、克希荷夫定律或質量守恆,將這些動態系統的模型用微分方程表示。
機械系統
Laplace tranceform
$$ \large F(s) = \mathscr{L} { f(t)} = \int_{0}^{\infty} f(t) e^{-st} \mathrm{d}t$$
- $ \large f(t) $ 為時域函數(time-domain function)
- $ \large F(s) $ 為S域函數(S-doamin function)
- $ \large s = \sigma + j \omega $
控制系統採用拉式轉換的主因為方便計算、設計簡單,透過拉式轉換將複雜的積分轉為線性計算。
- 基本函數的拉式轉換表
| 時域 $f(t)$ | S域 $F(s)$ | 收斂區間 |
|---|---|---|
| ${\displaystyle \delta (t)\ }$ | $\displaystyle1$ | 所有S |
| ${\displaystyle u(t)\ }$ | ${\displaystyle {1 \over s}}$ | ${\displaystyle \Re (s)>0}$ |
| ${\displaystyle t\cdot u(t)\ }$ | ${\displaystyle {\frac {1}{s^{2}}}}$ | ${\displaystyle \Re (s)>0}$ |
| ${\displaystyle t^{n}\cdot u(t)}$ | ${\displaystyle {n! \over s^{n+1}}}$ | ${\displaystyle \Re (s)>0{\text{ for }}n>-1}$ |
| ${\displaystyle e^{-\alpha t}\cdot u(t)}$ | ${\displaystyle {1 \over s+\alpha }}$ | ${\displaystyle \Re (s)>-\alpha}$ |
| ${\displaystyle t\cdot e^{-\alpha t}\cdot u(t)}$ | ${\displaystyle {\frac {1}{(s+\alpha )^{2}}}}$ | ${\displaystyle \Re (s)>-\alpha}$ |
| ${\displaystyle t^{n}e^{-\alpha t}\cdot u(t)}$ | ${\displaystyle {\frac {n!}{(s+\alpha )^{n+1}}}}$ | ${\displaystyle \Re (s)>-\alpha}$ |
| ${\displaystyle \sin(\omega t)\cdot u(t)\ }$ | ${\displaystyle {\omega \over s^{2}+\omega ^{2}}}$ | ${\displaystyle \Re (s)>0}$ |
| ${\displaystyle \cos(\omega t)\cdot u(t)\ }$ | ${\displaystyle {s \over s^{2}+\omega ^{2}}}$ | ${\displaystyle \Re (s)>0}$ |
| ${\displaystyle e^{-\alpha t}\sin(\omega t)\cdot u(t)\ }$ | ${\displaystyle {\omega \over (s+\alpha )^{2}+\omega ^{2}}}$ | ${\displaystyle \Re (s)>\alpha}$ |
| ${\displaystyle e^{-\alpha t}\cos(\omega t)\cdot u(t)\ }$ | ${\displaystyle {s+\alpha \over (s+\alpha )^{2}+\omega ^{2}}}$ | ${\displaystyle \Re (s)>-\alpha}$ |